Maker Pi RP2040
by Cytron Technologies
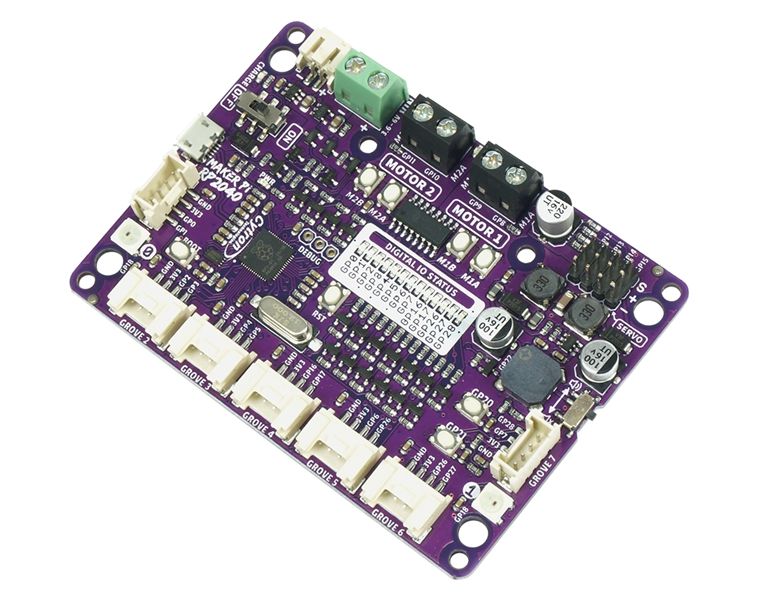
Cytron Maker Pi RP2040 features the RP2040 chip, embedded on a robot controller board. The board also comes with 2-channel DC motor driver, 4 servo motor ports and 7 Grove I/O connectors, ready for your next DIY robot/motion control projects.
The DC motor driver onboard is able to control two brushed DC motors or single bipolar/unipolar stepper motor from 3.6 V to 6 V, providing up to 1 A current per channel continuously. The built-in Quick Test buttons and motor output LEDs allow functional test of the motor driver in a quick and convenient way without the need of writing any test code. Vmotor for both DC and servo motors depends on the input voltage supplied to the board.
Maker Pi RP2040 has lots of LEDs for troubleshooting and visual effects, is able to make quite some noise with the onboard piezo buzzer and comes with push buttons ready to detect your touch.
There are three ways to supply power to the Maker Pi RP2040 - via USB (5 V) socket, with a single cell LiPo/Li-Ion battery or through the VIN (3.6-6 V) terminals. However only one power source is needed to power up both controller board and motors at a time. Power supply from all these power sources can all be controlled with the power on/off switch onboard.
CircuitPython is preloaded on the Maker Pi RP2040 and it runs a simple demo program right out-of-the-box. It can also be programmed with C/C++ (natively or with Arduino IDE support) or MicroPython.
Technical details
- Dual-core Arm Cortex-M0+ processor
- 264 KB internal RAM
- 2 MB of Flash memory
- Robot controller board
- 4x Servo motors (
GPIO12.GPIO13,GPIO14,GPIO15) - 2x DC motors with quick test buttons (Dual-channel H-bridge)
- 4x Servo motors (
- Versatile power circuit
- 7 Automatic power selection: USB 5 V, LiPo (1-cell) or Vin (3.6-6 V)
- Built-in 1-cell LiPo/Li-Ion charger (over-charged & over-discharged protection)
- Power on/off switch
- 13x Status indicator LEDs for GPIO pins
- 1x Piezo buzzer with mute switch
- 2x Push button
- 22x RGB LED (Neopixel)
- 7x Grove ports (flexible I/O options: digital, analog, I2C, SPI, UART)
- Mouting holes
- 4x 4.8 mm mounting hole (LEGO® pin compatible)
- 6x M3 screw hole
Resources
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
CircuitPython 9.0.4
This is the latest stable release of CircuitPython that will work with the Maker Pi RP2040.
Use this release if you are new to CircuitPython.
Built-in modules available: _asyncio, _bleio, _pixelmap, adafruit_bus_device, adafruit_pixelbuf, aesio, alarm, analogbufio, analogio, array, atexit, audiobusio, audiocore, audiomixer, audiomp3, audiopwmio, binascii, bitbangio, bitmaptools, bitops, board, builtins, builtins.pow3, busdisplay, busio, busio.SPI, busio.UART, codeop, collections, countio, digitalio, displayio, epaperdisplay, errno, floppyio, fontio, fourwire, framebufferio, getpass, gifio, hashlib, i2cdisplaybus, i2ctarget, imagecapture, io, jpegio, json, keypad, keypad.KeyMatrix, keypad.Keys, keypad.ShiftRegisterKeys, locale, math, memorymap, microcontroller, msgpack, neopixel_write, nvm, onewireio, os, os.getenv, paralleldisplaybus, pulseio, pwmio, qrio, rainbowio, random, re, rgbmatrix, rotaryio, rp2pio, rtc, sdcardio, select, sharpdisplay, storage, struct, supervisor, synthio, sys, terminalio, time, touchio, traceback, ulab, usb, usb_cdc, usb_hid, usb_host, usb_midi, usb_video, vectorio, warnings, watchdog, zlib
Included frozen(?) modules: adafruit_motor, neopixel, simpleio
CircuitPython 9.1.0-beta.1
This is the latest development release of CircuitPython that will work with the Maker Pi RP2040.
Alpha development releases are early releases. They are unfinished, are likely to have bugs, and the features they provide may change. Beta releases may have some bugs and unfinished features, but should be suitable for many uses. A Release Candidate (rc) release is considered done and will become the next stable release, assuming no further issues are found.
Please try alpha, beta, and rc releases if you are able. Your testing is invaluable: it helps us uncover and find issues quickly.
Release Notes for 9.1.0-beta.1
Built-in modules available: _asyncio, _bleio, _pixelmap, adafruit_bus_device, adafruit_pixelbuf, aesio, alarm, analogbufio, analogio, array, atexit, audiobusio, audiocore, audiomixer, audiomp3, audiopwmio, binascii, bitbangio, bitmapfilter, bitmaptools, bitops, board, builtins, builtins.pow3, busdisplay, busio, busio.SPI, busio.UART, codeop, collections, countio, digitalio, displayio, epaperdisplay, errno, floppyio, fontio, fourwire, framebufferio, getpass, gifio, hashlib, i2cdisplaybus, i2ctarget, imagecapture, io, jpegio, json, keypad, keypad.KeyMatrix, keypad.Keys, keypad.ShiftRegisterKeys, keypad_demux, keypad_demux.DemuxKeyMatrix, locale, math, memorymap, microcontroller, msgpack, neopixel_write, nvm, onewireio, os, os.getenv, paralleldisplaybus, pulseio, pwmio, qrio, rainbowio, random, re, rgbmatrix, rotaryio, rp2pio, rtc, sdcardio, select, sharpdisplay, storage, struct, supervisor, synthio, sys, terminalio, time, touchio, traceback, ulab, usb, usb_cdc, usb_hid, usb_host, usb_midi, usb_video, vectorio, warnings, watchdog, zlib
Included frozen(?) modules: adafruit_motor, neopixel, simpleio
Absolute Newest
Every time we commit new code to CircuitPython we automatically build binaries for each board and language. The binaries are stored on Amazon S3, organized by board, and then by language. These releases are even newer than the development release listed above. Try them if you want the absolute latest and are feeling daring or want to see if a problem has been fixed.
Previous Versions of CircuitPython
All previous releases of CircuitPython are available for download from Amazon S3 through the button below. For very old releases, look in the OLD/ folder for each board. Release notes for each release are available at GitHub button below.
Older releases are useful for testing if you something appears to be broken in a newer release but used to work, or if you have older code that depends on features only available in an older release. Otherwise we recommend using the latest stable release.