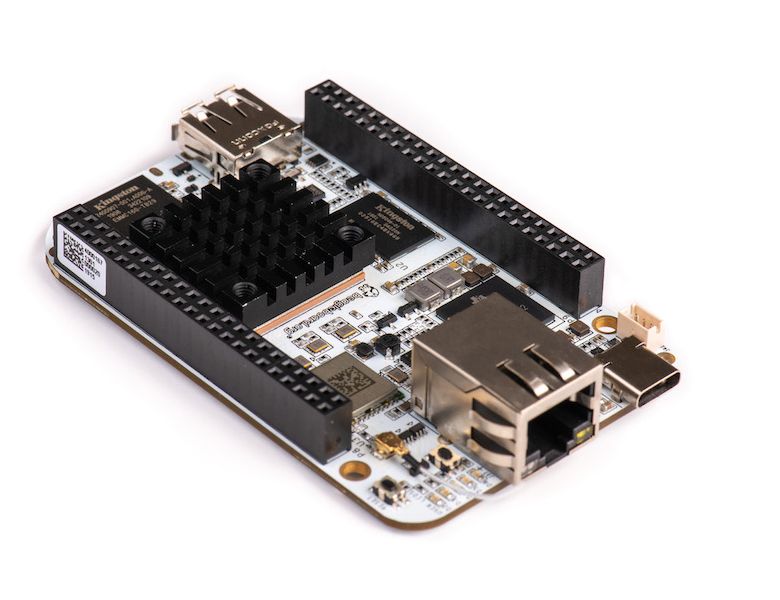
BeagleBone AI by BeagleBoard
Built on the proven BeagleBoard.org® open source Linux approach, BeagleBone® AI fills the gap between small SBCs and more powerful industrial computers. Based on the Texas Instruments AM5729, developers have access to the powerful SoC with the ease of BeagleBone® Black header and mechanical compatibility. BeagleBone® AI makes it easy to explore how artificial intelligence (AI) can be used in everyday life via the TI C66x digital-signal-processor (DSP) cores and embedded-vision-engine (EVE) cores supported through an optimized TIDL machine learning OpenCL API with pre-installed tools. Focused on everyday automation in industrial, commercial and home applications.
- Processor: Sitara AM5729
- Dual Arm® Cortex®-A15 microprocessor subsystem
- 2 C66x floating-point VLIW DSPs
- 2.5MB of on-chip L3 RAM
- 2x dual Arm® Cortex®-M4 co-processors
- 4x Embedded Vision Engines (EVEs)
- 2x dual-core Programmable Real-Time Unit and Industrial Communication SubSystem (PRU-ICSS)
- 2D-graphics accelerator (BB2D) subsystem
- Dual-core PowerVR® SGX544™ 3D GPU
- IVA-HD subsystem (4K @ 15fps encode and decode support for H.264, 1080p60 for others)
- BeagleBone Black mechanical and header compatibility
- 1GB RAM and 16GB on-board eMMC flash with high-speed interface
- USB type-C for power and superspeed dual-role controller; and USB type-A host
- Gigabit Ethernet, 2.4/5GHz WiFi, and Bluetooth
- microHDMI
- Zero-download out-of-box software experience with Debian GNU/Linux
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
Adafruit Blinka Installation
We use a special library called adafruit_blinka (named after Blinka, the CircuitPython mascot) to provide the layer that translates the CircuitPython hardware API to whatever library the Linux board provides.
For example, on Raspberry Pi we use the python RPi.GPIO library. For any I2C interfacing we'll use ioctl messages to the /dev/i2c device. For SPI we'll use the spidev python library, etc. These details don't matter so much because they all happen underneath the adafruit_blinka layer.
Features: Ethernet, Wi-Fi, Bluetooth/BLE, HDMI/DisplayPort, OSHWA Certified
Board Usage Options: Linux Single Board Computer