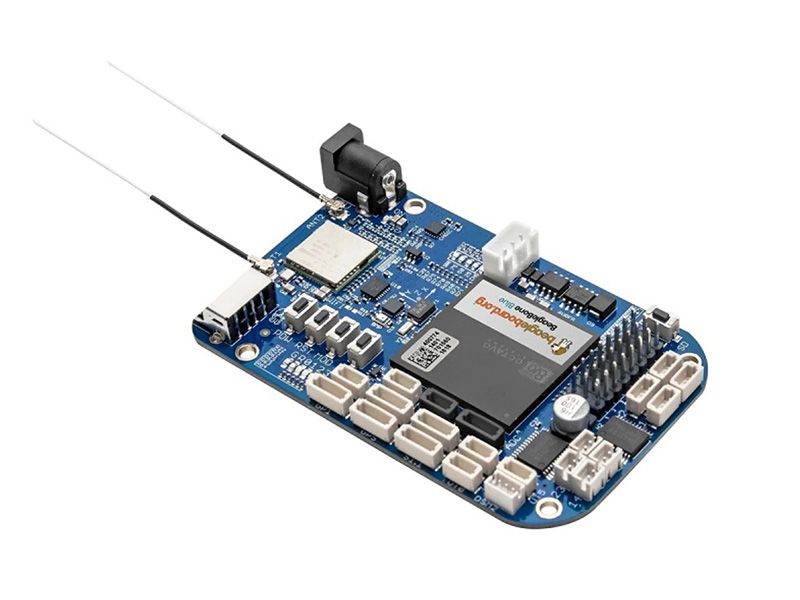
BeagleBone Blue by BeagleBoard
BeagleBone® Blue is an all-in-one Linux-based computer for robotics, integrating onto a single small (3.5” x 2.15”) board the Octavo OSD3358 microprocessor together with wifi/bluetooth, IMU/barometer, power regulation and state-of-charge LEDs for a 2-cell LiPo, H-Bridges, and discrete connectors for 4 DC motors+encoders, 8 servos, and all of the commonly-needed buses for additional peripherals in embedded applications. Fully open source and actively supported by a strong community, the real-time performance, flexible networking, and rich set of robotics-oriented capabilities make building mobile robots with the Blue fast, streamlined, affordable, and fun.
- AM335x 1GHz ARM® Cortex-A8 processor
- 512MB DDR3 RAM
- 4GB 8-bit eMMC flash storage
- Integrated power management
- 2×32-bit 200-MHz programmable real-time units (PRUs)
- NEON floating-point accelerator
- ARM Cortex-M3
- USB2 client for power & communications, USB2 host
- Battery support: 2-cell LiPo with balancing, LED state-of-charge monitor
- Charger input: 9-18V
- Wireless: 802.11bgn, Bluetooth 4.1 and BLE
- Motor control: 8 6V servo out, 4 bidirectional DC motor out, 4 quadrature encoder in
- Sensors: 9 axis IMU (accels, gyros, magnetometer), barometer, thermometer
- User interface: 11 user programmable LEDs, 2 user programmable buttons
- Easy connect JST interfaces for adding additional buses and peripherals including: GPS, DSM2 radio, UARTs, SPI, I2C, 1.8V analog, 3.3V GPIOs
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
Adafruit Blinka Installation
We use a special library called adafruit_blinka (named after Blinka, the CircuitPython mascot) to provide the layer that translates the CircuitPython hardware API to whatever library the Linux board provides.
For example, on Raspberry Pi we use the python RPi.GPIO library. For any I2C interfacing we'll use ioctl messages to the /dev/i2c device. For SPI we'll use the spidev python library, etc. These details don't matter so much because they all happen underneath the adafruit_blinka layer.
Features: Wi-Fi, Bluetooth/BLE, STEMMA QT/QWIIC, OSHWA Certified
Board Usage Options: Linux Single Board Computer