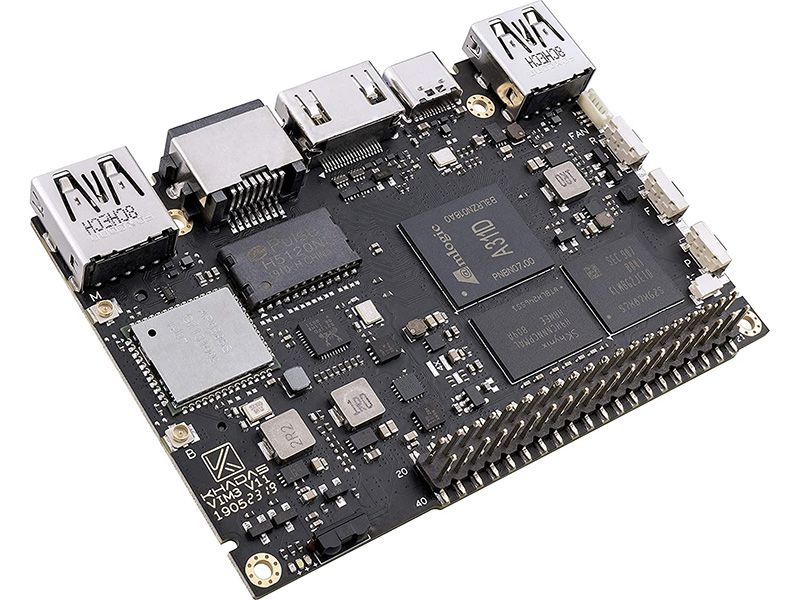
Khadas VIM3 by Khadas
- High Performance: Amlogic A311D - x4 2.2Ghz Cortex A73, x2 1.8Ghz Cortex A53 12nm SoC fabrication process for low heat 2T2R AC Wi-Fi with RSDB Features Bluetooth 5.0 USB 3.0 Available Gigabit Ethernet with WOL support LPDDR4/X USB-C PD for heavy applications
- Neural Network Accelerator: NPU: Supports a maximum frequency of 800MHz at 5.0 TOPS INT8 inference up to 1536 MAC Internal L2 cache (512KB) and system workspace buffer (1MB) Supports all major deep learning frameworks including TensorFlow and Caffe
- Maker Friendly: Stackable Design Programmable MCU 3 Programmable LEDs (Blue, Red and White) XPWR for external Power button Onboard SPI Flash Khadas TST Khadas KBI
- Business Applications Dual independent displays with GSensor H.264 / H.265 Encoding Supports multi-video decoding up to 4Kx2K@60fps+1x1080P@60fps VIN Power Input
- Rich IO: 40 Pin GPIO Header (USB, I2C, I2S, UART, ADC etc) 8-ch I2S for Microphone Array application (over M.2 Connector) MIPI-DSI MIPI-CSI Designed with GPIO Extender Chip
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
Adafruit Blinka Installation
We use a special library called adafruit_blinka (named after Blinka, the CircuitPython mascot) to provide the layer that translates the CircuitPython hardware API to whatever library the Linux board provides.
For example, on Raspberry Pi we use the python RPi.GPIO library. For any I2C interfacing we'll use ioctl messages to the /dev/i2c device. For SPI we'll use the spidev python library, etc. These details don't matter so much because they all happen underneath the adafruit_blinka layer.
Features: Ethernet, HDMI/DisplayPort, Wi-Fi, 40-pin GPIO, USB 3.0, Bluetooth/BLE, Infrared Receiver, NVME/M.2 Connector
Board Usage Options: Linux Single Board Computer