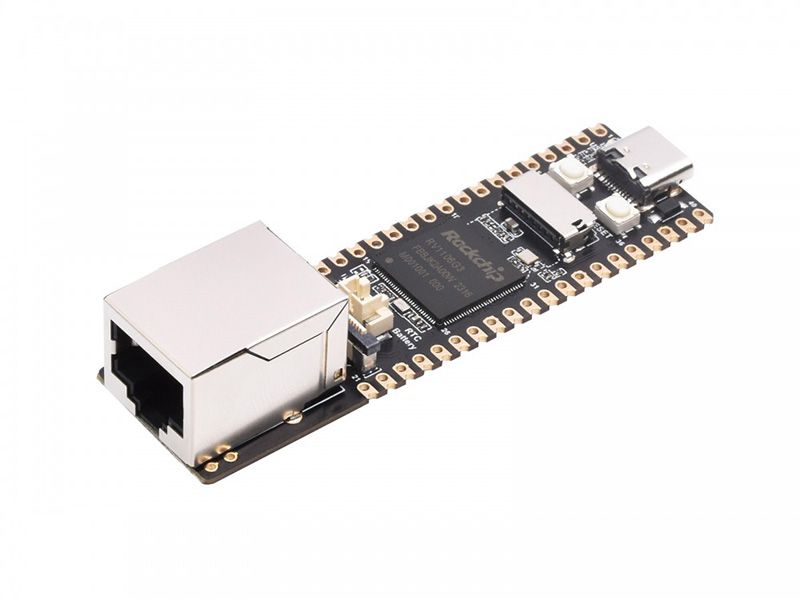
LuckyFox Pico Pro/Max by LuckyFox
LuckFox Pico Pro/Max is a cost-effective Linux micro development board, based on the Rockchip RV1106 chip to provide a simple and efficient development platform for developers; Supports a variety of interfaces including MIPI CSI, GPIO, UART, SPI, 12C, USB, etc., which is convenient for developing and debugging quickly.
- Single-core ARM Cortex-A7 32-bit core with integrated NEON and FPU
- Built-in Rockchip self-developed 4th generation NPU, features high computing precision and supports int4, int8, and int16 hybrid quantization. The computing power of int8 is 0.5 TOPS, and up to 1.0 TOPS with int4
- Built-in self-developed third-generation ISP3.2, supports 5-Megapixel, with multiple image enhancement and correction algorithms such as HDR, WDR, multi-level noise reduction, etc.
- Features powerful encoding performance, supports intelligent encoding mode and adaptive stream saving according to the scene, saves more than 50% bit rate of the conventional CBR mode so that the images from camera are high-definition with smaller size, double the storage space
- Built-in 16-bit DRAM DDR2, which is capable of sustaining demanding memory bandwidths
- Integrated with built-in POR, audio codec and MAC PHY
Specifications
- Cortex [email protected]
- 0.5TOPS, supports int4, int8 and int16
- Input 5M @30fps (Max)
- 256MB DDR2 (128MB DDR2 on Pro)
- USB 2.0 Host/Device
- MIPI CSI 2-lane
- 26 × GPIO pins
- 10/100M Ethernet controller and embedded PHY
- SPI NAND FLASH (256MB)
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
Adafruit Blinka Installation
We use a special library called adafruit_blinka (named after Blinka, the CircuitPython mascot) to provide the layer that translates the CircuitPython hardware API to whatever library the Linux board provides.
For example, on Raspberry Pi we use the python RPi.GPIO library. For any I2C interfacing we'll use ioctl messages to the /dev/i2c device. For SPI we'll use the spidev python library, etc. These details don't matter so much because they all happen underneath the adafruit_blinka layer.
Features: Ethernet
Board Usage Options: Linux Single Board Computer