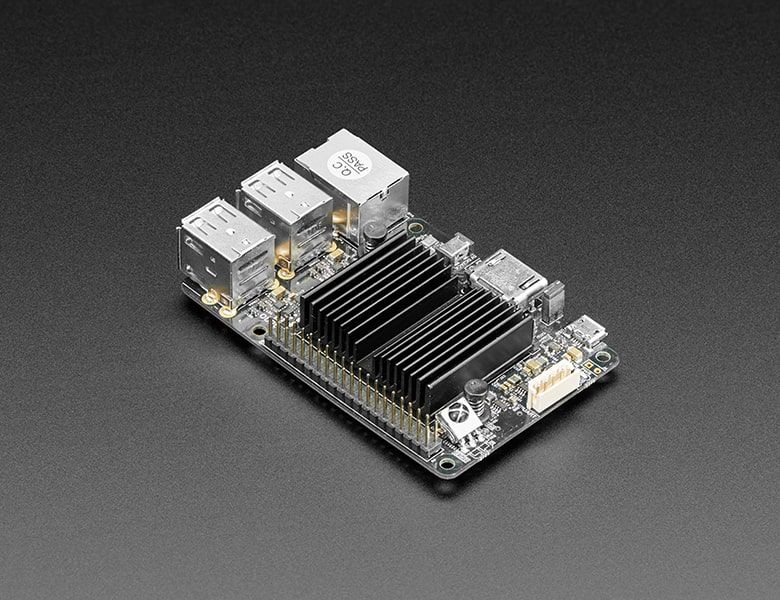
ODROID C2 by Hardkernel co., Ltd.
The ODROID-C2 is a 64-bit quad-core single board computer(SBC) that is one of the most cost-effective 64bit development boards available in the ARM world. It can function as a home theater set-top box, a general purpose computer for web browsing, gaming and socializing, a compact tool for college or office work, a prototyping device for hardware tinkering, a controller for home automation, a workstation for software development, and much more.
Some of the modern operating systems that run on the ODROID-C2 are Ubuntu, Android, ARCHLinux, Debian, with thousands of free open-source software packages available. The ODROID-C2 is an ARM device — the most advanced architecture for mobile devices and embedded 64-bit computing. The ARM processor’s small size, reduced complexity and low power consumption makes it very suitable for miniaturized devices such as wearables and embedded controllers.
- Amlogic S905 ARM Cortex-A53(ARMv8) 1.5Ghz quad core CPUs
- Mali-450 GPU
- Supports OpenGL ES 2.0 / 1.1
- 3 Pixel-processors
- 2 Vertex shader processors
- 2GB DDR3 SDRAM
- Gigabit Ethernet
- HDMI 2.0 4K/60Hz display
- H.265 4K/60FPS and H.264 4K/30FPS capable VPU
- 40pin GPIOs + 7pin I2S
- eMMC5.0 HS400 Flash Storage slot
- UHS-1 SDR50 MicroSD Card slot
- USB 2.0 Host x 4
- USB OTG x 1 (power + data capable)
- Infrared(IR) Receiver
- Ubuntu 16.04 or Android 6.0 Marshmallow based on Kernel 3.14LTS
- Armbian Support
- Guaranteed production of C2 to the end of 2019
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
Adafruit Blinka Installation
We use a special library called adafruit_blinka (named after Blinka, the CircuitPython mascot) to provide the layer that translates the CircuitPython hardware API to whatever library the Linux board provides.
For example, on Raspberry Pi we use the python RPi.GPIO library. For any I2C interfacing we'll use ioctl messages to the /dev/i2c device. For SPI we'll use the spidev python library, etc. These details don't matter so much because they all happen underneath the adafruit_blinka layer.
Features: Ethernet, HDMI/DisplayPort, 40-pin GPIO, Infrared Receiver
Board Usage Options: Linux Single Board Computer