ODROID M1 by Hardkernel co., Ltd.
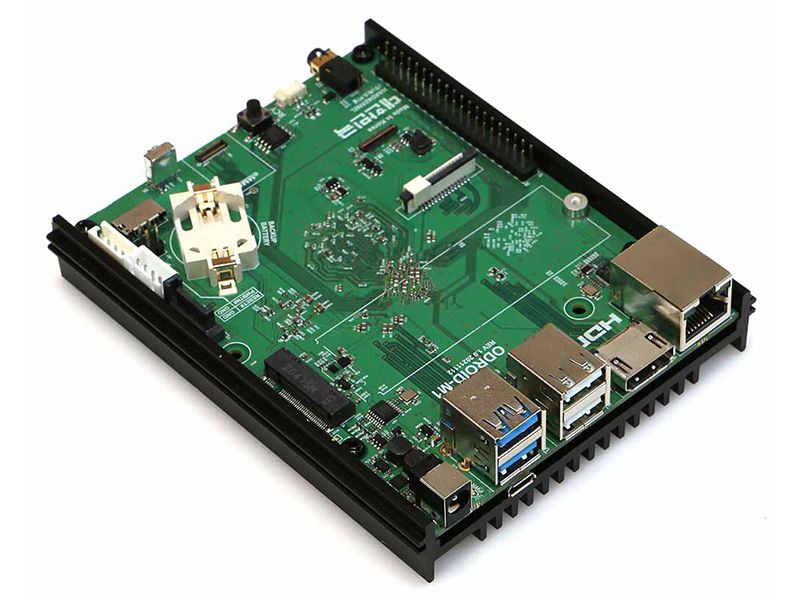
The ODROID-M1 is a single board computer with a wide range of useful peripherals developed for use in a variety of embedded system applications. To achieve this goal, we have developed various hardware accessories and device driver software over the past 10 months. In addition, RK3568B2, the core brain of ODROID-M1, is considered suitable for embedded application use as the SoC manufacturer (Rockchip) guarantees supply for the next 15 years. Therefore, we expect we can supply the ODROID-M1 boards to our important B2B customers until the year 2036 or beyond.
Note that RK3568B2 is a slightly modified version of the RK3568 to overcome the IC supply chain problem these days. The previous RK3568 metal-can type packaging lead time is much longer than the more common plastic package of the RK3568B2.
Let’s take a look at the main features and peripherals of ODROID-M1.
- Rockchip RK3568B2 CPU
- LPDDR4 RAM
- 1 x Micro USB2.0 Device only
- 1 x RJ45 Ethernet Port (10/100/1000)
- 1 x HDMI 2.0
- 2 x USB 2.0
- 2 x USB 3.0
- 1 x DC Power Jack
- 1 x M.2 NVMe M-Key PCIe3.0 2-Lane
- 40 x GPIO Pins
- 1 x MIPI CSI 2Lane
- 1 x MIPI DSI 4Lane
- 1 x 3.5mm Headphone Jack
- 1 x Mono Speaker Output (1.3W at 8Ω load)
- 1 x SPI recovery Switch
- 1 x SPI Flash 16MiB
- 1 x eMMC Module Socket
- 1 x IR Receiver
- 1 x RTC Backup Battery Holder
- 1 x Reset jumper
- 1 x Power jumper
- 1 x Micro SD Slot
- 1 x SATA3
- 1 x SATA Power (5volt only)
- 1 x UART for System Console
- 2 x System LED Indicators
- 1 x M.2 LED Indicator
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
Adafruit Blinka Installation
We use a special library called adafruit_blinka (named after Blinka, the CircuitPython mascot) to provide the layer that translates the CircuitPython hardware API to whatever library the Linux board provides.
For example, on Raspberry Pi we use the python RPi.GPIO library. For any I2C interfacing we'll use ioctl messages to the /dev/i2c device. For SPI we'll use the spidev python library, etc. These details don't matter so much because they all happen underneath the adafruit_blinka layer.
Features: Ethernet, USB 3.0, HDMI/DisplayPort, 40-pin GPIO, Infrared Receiver, NVME/M.2 Connector
Board Usage Options: Linux Single Board Computer