ODYSSEY - X86J4105 by SeeedStudio
Edge Computing devices are playing an increasingly important role in the field of IoT. Nowadays, a computer is not just a big rectangular black box under the desk, or a small portable device working on your knees. Computers are ubiquitous devices that span calculating, communicating, and data storage. Based on this definition, here we would like to introduce our new product – the ODYSSEY - X86J4105.
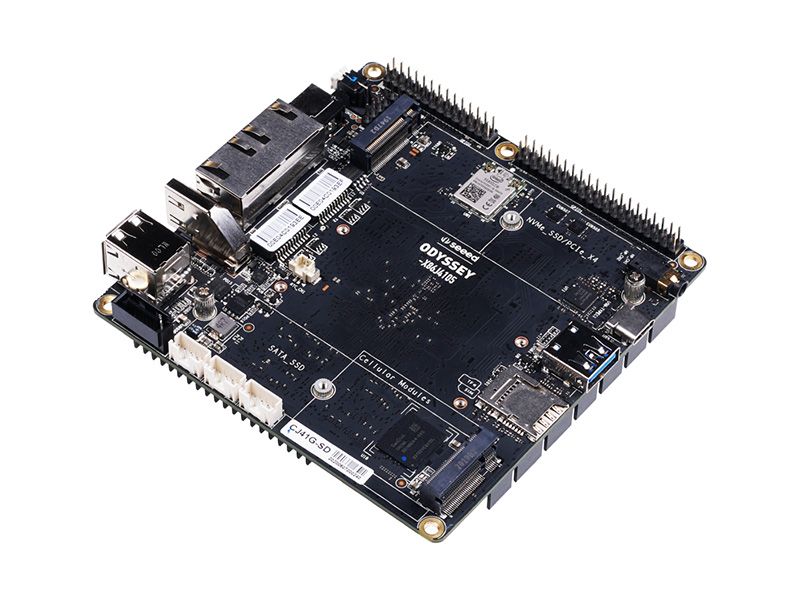
ODYSSEY is a series of SBC (Single Board Computer), allowing you to build Edge Computing applications with ease. The ODYSSEY - X86J4105, based on Intel Celeron J4105, is a Quad-Core 1.5GHz CPU that bursts up to 2.5GHz. It includes all the powerful features of Mini PC such as including an 8GB LPDDR4 RAM, 64GB eMMC Storage(optional), onboard Wi-Fi/BLE, Dual Gigabyte Ethernet Ports, Audio Input and Output, USB Ports, HDMI, SATA Connectors and PCIe, however, within a cost-effective price. With simple connections to Mouse, Keyboard and Monitor to ODYSSEY - X86J4105, you will get a Desktop Mini PC right away. With eMMC versions, you even have the Windows 10 Enterprise pre-installed!
Just simply connect to a mouse, a keyboard and a monitor with the ODYSSEY – X86J4105, you will get a powerful Desktop Mini PC that can run Windows and Linux OS.
- Intel® Celeron® J4105, Quad-Core 1.5-2.5GHZ
- Dual-Band Frequency 2.4GHz/5GHz WiFi
- Intel® UHD Graphics 600
- Dual Gigabit Ethernet
- Integrated Arduino Coprocessor ATSAMD21 ARM® Cortex®-M0+
- Raspberry Pi 40-Pin Compatible
- 2 x M.2 PCIe (B Key and M Key)
- Support Windows 10 & Linux OS
- Compatible with Grove Ecosystem
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
Adafruit Blinka Installation
We use a special library called adafruit_blinka (named after Blinka, the CircuitPython mascot) to provide the layer that translates the CircuitPython hardware API to whatever library the Linux board provides.
For example, on Raspberry Pi we use the python RPi.GPIO library. For any I2C interfacing we'll use ioctl messages to the /dev/i2c device. For SPI we'll use the spidev python library, etc. These details don't matter so much because they all happen underneath the adafruit_blinka layer.
Features: Wi-Fi, Bluetooth/BLE, Ethernet, HDMI/DisplayPort, USB 3.0, NVME/M.2 Connector
Board Usage Options: Linux Single Board Computer