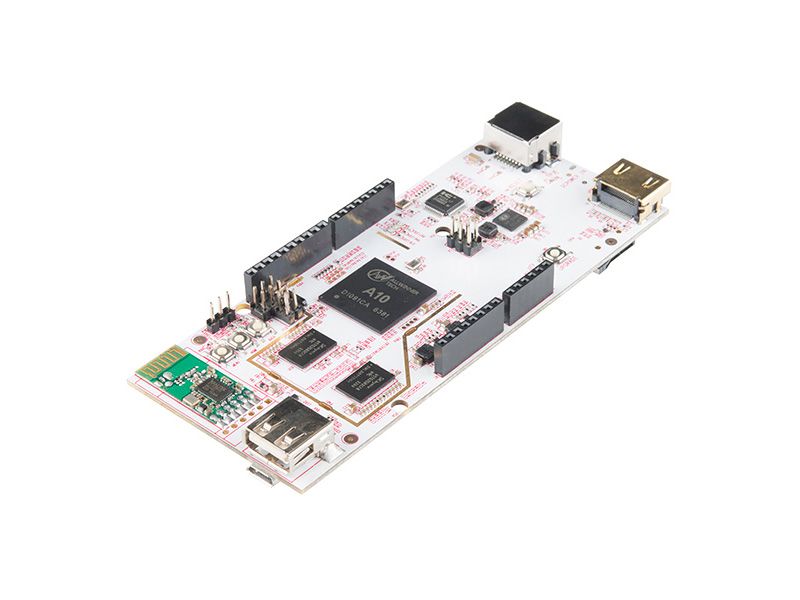
pcDuino2 by LinkSprite
As the field of embedded electronics gets more advanced, hobbyists and professionals are both in need of smaller and more powerful computers. The pcDuino2 is a high performance, cost effective mini PC platform that runs full-featured operating systems such as Ubuntu and Android ICS. Now included with the pcDuino2 is a built in Wi-Fi module and Arduino headers (finally with the same architecture as Uno boards) meaning you will no longer need to purchase a separate wireless module or shield adapter for this dev board!
It’s easy to hook up, just connect 5V power and a keyboard and mouse. The pcDuino2 outputs video to any HDMI enabled TV or monitor via the built in HDMI interface. It was specifically designed to make it easy for the open source community to develop computationally demanding projects using the vast, existing catalog of Arduino Shields.
An API has been developed for the pcDuino2 that allows the user to access all of the functions that you would expect using simple Arduino-style language.
Features:
- 1GHz ARM Cortex A8 CPU
- GPU: OpenGL ES2.0, OpenVG 1.1 Mali 400 core
- 1GB DRAM
- Onboard Storage: 4GB Flash, microSD card (TF) slot for up to 32GB
- Arduino-Style Peripheral Headers
- HDMI Video Output
- Linux3.0 + Ubuntu12.04 and Android ICS 4.0 Supported
- 0.1” Spaced GPIO Headers
- RJ45 Ethernet Connection and On-Board Wi-Fi Module
- Power Requirements: 2A @ 5VDC
- API to access the following interfaces:
- UART
- ADC
- PWM
- GPIO
- I2C
- SPI
- Program in C, C++ with GNU tool chain
- Java with Android SDK
- Python
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
Adafruit Blinka Installation
We use a special library called adafruit_blinka (named after Blinka, the CircuitPython mascot) to provide the layer that translates the CircuitPython hardware API to whatever library the Linux board provides.
For example, on Raspberry Pi we use the python RPi.GPIO library. For any I2C interfacing we'll use ioctl messages to the /dev/i2c device. For SPI we'll use the spidev python library, etc. These details don't matter so much because they all happen underneath the adafruit_blinka layer.