ItsyBitsy RP2040 by Adafruit
A new chip means a new ItsyBitsy, and the Raspberry Pi RP2040 is no exception. When we saw this chip we thought “this chip is going to be awesome when we give it the ItsyBitsy teensy-weensy Treatment” and so we did! This Itsy’ features the RP2040, and all niceties you know and love about the ItsyBitsy family.
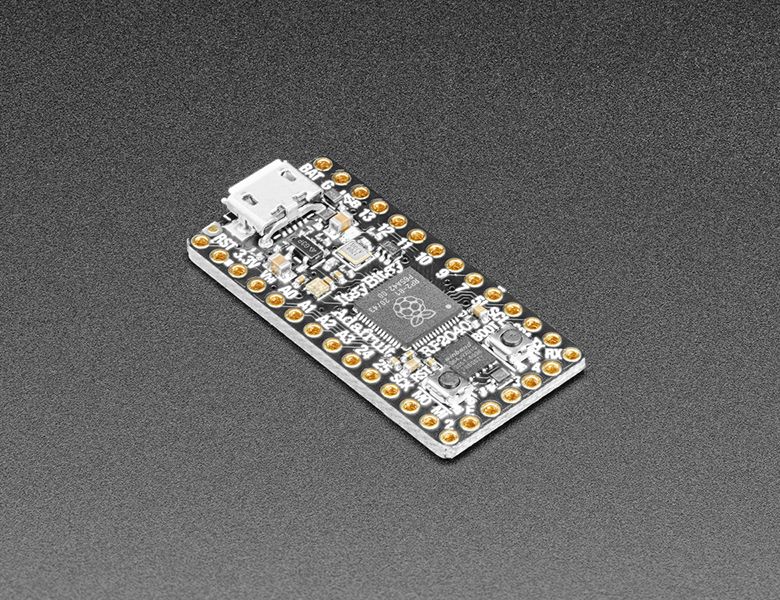
What’s smaller than a Feather but larger than a Trinket? It’s an Adafruit ItsyBitsy RP2040 featuring the Raspberry Pi RP2040! Small, powerful, with a ultra fast duel Cortex M0+ processor running at 125 MHz - this microcontroller board is perfect when you want something very compact, with lots of horsepower and a bunch of pins. This Itsy has sports car speed, but SUV roominess with 4 MB of FLASH and 264 KB of SRAM.
ItsyBitsy RP2040 is only 1.4” long by 0.7” wide, but has 6 power pins, 23 digital GPIO pins (4 of which can be analog in and 16x PWM out). It’s the same chip as the Feather RP2040 and Raspberry Pi Pico but really really small. So it’s great once you’ve finished up a prototype, and want to make the project much smaller. It even comes with 4MB of SPI Flash built in, for data logging, file storage, or CircuitPython/MicroPython code.
Technical details
- Same size and form-factor as the rest of the ItsyBitsy family and nearly-identical pinout
- Measures 1.4” x 0.7” x 0.2” (36 mm x 18 mm x 4 mm) without headers soldered in
- RP2040 32-bit Cortex M0+ dual core running at ~125 MHz @ 3.3 V logic and power
- 264 KB RAM
- 4 MB SPI FLASH chip for storing files and CircuitPython/MicroPython code storage. No EEPROM
- 23 GPIO pins with following capabilities:
- 4 12 bit ADCs (one more than Pico)
- 2 I2C, 2 SPI and 2 UART peripherals, we label one for the ‘main’ interface in standard ItsyBitsy locations
- 16 PWM outputs - for servos, LEDs, etc
- The 10 digital ‘non-ADC/non-peripheral’ GPIO are consecutive for maximum PIO compatibility
- Pin #13 red LED for general purpose blinking
- RGB NeoPixel with power pin on GPIO so you can depower it for low power usages.
- Both Reset button and Bootloader select button for quick restarts (no unplugging-replugging to relaunch code)
- 3.3 V regulator with 500mA peak current output
- 3.3 V Power/enable pin
- Power with either USB or external output (such as a battery) - it’ll automatically switch over
- Broken-out SWD pins for debug access
- 24 MHz crystal for perfect timing.
- Special Vhigh output pin gives you the higher voltage from VBAT or VUSB, for driving NeoPixels, servos, and other 5V-logic devices. Digital 5 level-shifted output for high-voltage logic level output.
- USB Micro B connector lets you access built-in ROM USB bootloader and serial port debugging
Inside the RP2040 is a ‘permanent ROM’ USB UF2 bootloader. What that means is when you want to program new firmware, you can hold down the BOOTSEL button while plugging it into USB (or pulling down the RUN/Reset pin to ground) and it will appear as a USB disk drive you can drag the firmware onto. Folks who have been using Adafruit products will find this very familiar - we use the technique on all our native-USB boards. Just note you don’t double-click reset, instead hold down BOOTSEL during boot to enter the bootloader!
The RP2040 is a powerful chip, which has the clock speed of our M4 (SAMD51), and two cores that are equivalent to our M0 (SAMD21). Since it is an M0 chip, it does not have a floating point unit or DSP hardware support - so if you’re doing something with heavy floating point math, it will be done in software and thus not as fast as an M4. For many other computational tasks, you’ll get close-to-M4 speeds!
For peripherals, there are two I2C controllers, two SPI controllers, and two UARTs that are multiplexed across the GPIO - check the pinout for what pins can be set to which. There are 16 PWM channels, each pin has a channel it can be set to (ditto on the pinout).
You’ll note there’s no I2S peripheral, or SDIO, or camera, what’s up with that? Well instead of having specific hardware support for serial-data-like peripherals like these, the RP2040 comes with the PIO state machine system which is a unique and powerful way to create custom hardware logic and data processing blocks that run on their own without taking up a CPU. For example, NeoPixels - often we bitbang the timing-specific protocol for these LEDs. For the RP2040, we instead use PIO object that reads in the data buffer and clocks out the right bitstream with perfect accuracy. Same with I2S audio in or out, LED matrix displays, 8-bit or SPI based TFTs, even VGA! In MicroPython and CircuitPython you can create PIO control commands to script the peripheral and load it in at runtime. There are 2 PIO peripherals with 4 state machines each.
At the time of launch, there is no Arduino core support for this board. There is great C/C++ support, an official MicroPython port, and a CircuitPython port! We of course recommend CircuitPython because we think it’s the easiest way to get started and it has support with most of our drivers, displays, sensors, and more, supported out of the box so you can follow along with our CircuitPython projects and tutorials.
This Itsy comes with loose 0.1” headers you can solder in for breadboard use!
While the RP2040 has lots of onboard RAM (264 KB), it does not have built-in FLASH memory. Instead, that is provided by the external QSPI flash chip. On this board there is 2 MB, which is shared between the program it’s running and any file storage used by MicroPython or CircuitPython. When using C/C++ you get the whole flash memory, if using Python you will have about 1 MB remaining for code, files, images, fonts, etc.
RP2040 Chip features:
- Dual ARM Cortex-M0+ @ 133 MHz
- 264 kB on-chip SRAM in six independent banks
- Support for up to 16MB of off-chip Flash memory via dedicated QSPI bus
- DMA controller
- Fully-connected AHB crossbar
- Interpolator and integer divider peripherals
- On-chip programmable LDO to generate core voltage
- 2 on-chip PLLs to generate USB and core clocks
- 30 GPIO pins, 4 of which can be used as analog inputs
- Peripherals
- 2 UARTs
- 2 SPI controllers
- 2 I2C controllers
- 16 PWM channels
- USB 1.1 controller and PHY, with host and device support
- 8 PIO state machines
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
CircuitPython 10.2.1
This is the latest stable release of CircuitPython that will work with the ItsyBitsy RP2040. Use this release if you are new to CircuitPython.
Modules included in this download
_asyncio _bleio _bleio (HCI co-processor) _pixelmap adafruit_bus_device adafruit_pixelbuf aesio alarm analogbufio analogio array atexit audiobusio audiocore audiomixer audiomp3 audiopwmio binascii bitbangio bitmapfilter bitmaptools bitops board builtins builtins.pow3 busdisplay busio busio.SPI busio.UART codeop collections countio digitalio displayio epaperdisplay errno floppyio fontio fourwire framebufferio getpass gifio hashlib i2cdisplaybus i2cioexpander i2ctarget imagecapture io jpegio json keypad keypad.KeyMatrix keypad.Keys keypad.ShiftRegisterKeys keypad_demux keypad_demux.DemuxKeyMatrix locale lvfontio math memorymap microcontroller msgpack neopixel_write nvm onewireio os os.getenv paralleldisplaybus pulseio pwmio qrio rainbowio random re rgbmatrix rotaryio rp2pio rtc sdcardio select sharpdisplay storage struct supervisor supervisor.get_setting synthio sys terminalio tilepalettemapper time touchio traceback ulab usb usb_cdc usb_hid usb_host usb_midi usb_video vectorio warnings watchdog zlibFeatures: Breadboard-Friendly, OSHWA Certified
CircuitPython 10.3.0-alpha.4
This is the latest development release of CircuitPython that will work with the ItsyBitsy RP2040.
Alpha development releases are early releases. They are unfinished, are likely to have bugs, and the features they provide may change. Beta releases may have some bugs and unfinished features, but should be suitable for many uses. A Release Candidate (rc) release is considered done and will become the next stable release, assuming no further issues are found.
Please try alpha, beta, and rc releases if you are able. Your testing is invaluable: it helps us uncover and find issues quickly.
Release Notes for 10.3.0-alpha.4
Modules included in this download
_asyncio _bleio _bleio (HCI co-processor) _pixelmap adafruit_bus_device adafruit_pixelbuf aesio alarm analogbufio analogio array atexit audiobusio audiocore audiodelays audiofilewriter audiofilters audiofreeverb audioi2sin audiomixer audiomp3 audiopwmio audiospeed binascii bitbangio bitmapfilter bitmaptools bitops board builtins builtins.pow3 busdisplay busio busio.SPI busio.UART codeop collections countio digitalio displayio epaperdisplay errno floppyio fontio fourwire framebufferio getpass gifio hashlib i2cdisplaybus i2cioexpander i2ctarget imagecapture io jpegio json keypad keypad.KeyMatrix keypad.Keys keypad.ShiftRegisterKeys keypad_demux keypad_demux.DemuxKeyMatrix locale lvfontio math memorymap microcontroller msgpack neopixel_write nvm onewireio os os.getenv paralleldisplaybus pulseio pwmio qrio rainbowio random re rgbmatrix rotaryio rp2pio rtc sdcardio select sharpdisplay storage struct supervisor supervisor.get_setting synthio sys terminalio tilepalettemapper time touchio traceback ulab usb usb_audio usb_cdc usb_hid usb_host usb_midi usb_video vectorio warnings watchdog zlibFeatures: Breadboard-Friendly, OSHWA Certified
Absolute Newest
Every time we commit new code to CircuitPython we automatically build binaries for each board and language. The binaries are stored on Amazon S3, organized by board, and then by language. These releases are even newer than the development release listed above. Try them if you want the absolute latest and are feeling daring or want to see if a problem has been fixed.
Previous Versions of CircuitPython
All previous releases of CircuitPython are available for download from Amazon S3 through the button below. For very old releases, look in the OLD/ folder for each board. Release notes for each release are available at GitHub button below.
Older releases are useful for testing if you something appears to be broken in a newer release but used to work, or if you have older code that depends on features only available in an older release. Otherwise we recommend using the latest stable release.