Feather M0 Express + Crickit by Adafruit
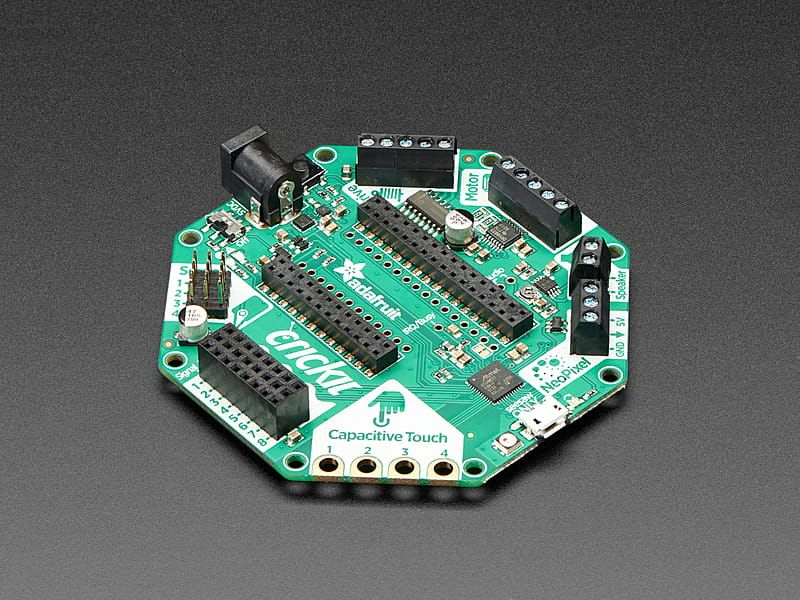
Crickit is Adafruit’s Creative Robotics & Interactive Construction Kit. It’s an add-on to popular Feather ecosystem boards that lets you #MakeRobotFriend using CircuitPython.
Plug in any Feather mainboard you want into the center, and you’re good to go! The Crickit is powered by seesaw, an I2C-to-whatever bridge firmware. So you only need to use two I2C data pins to control the huge number of inputs and outputs on the Crickit. All those timers, PWMs, sensors are offloaded to the co-processor.
The only thing that is not managed by seesaw is the audio output. Provided is a small jumper you can solder to connect the audio amplifier to the first analog pin. On Feather M0’s this is a true analog output (DAC) and you can play audio clips with CircuitPython. Other Feathers may not have a DAC! In that case, you can solder a wire to jumper the audio amp to a PWM pin.
You get to use all the non-I2C signal pins on your feather and get a boat-load of extra in/out pins, motor controllers, capacitive touch sensors, a NeoPixel driver and amplified speaker output. It complements & extends your Feather so you can still use all the goodies, including stacking FeatherWings on top. But now you have a robotics playground as well.
Technical details
- 4 x Analog or Digital Servo control, with precision 16-bit timers
- 2 x Bi-directional brushed DC motor control, 1 A current limited each, with 8-bit PWM speed control (or one stepper)
- 4 x High current “Darlington” 500 mA drive outputs with kick-back diode protection. For solenoids, relays, large LEDs, or one uni-polar stepper
- 4 x Capacitive touch sensors with alligator-pads
- 8 x Signal pins, digital in/out or analog inputs
- 1 x NeoPixel driver with 5V level shifter - The NeoPixels are buffered and controlled by the seesaw chip
- 1 x Class D, 4-8 ohm speaker, 3 W-max audio amplifier - the audio input pin is available as a solder-able pad for your configuration, you can connect it to your Feather’s DAC or PWM output as you desire.
All are powered via 5V DC, so you can use any 5V-powered servos, DC motors, steppers, solenoids, relays etc. To keep things simple and safe, we don’t support mixing voltages, so only 5V, not for use with 9V or 12V robotic components.
Tutorial
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
CircuitPython 10.2.1
This is the latest stable release of CircuitPython that will work with the Feather M0 Express + Crickit. Use this release if you are new to CircuitPython.
Modules included in this download
adafruit_pixelbuf analogio array audiobusio audiocore audioio board builtins busio busio.SPI busio.UART codeop collections digitalio errno locale math microcontroller neopixel_write nvm onewireio os pulseio pwmio rainbowio random rotaryio rtc storage struct supervisor sys time touchio usb_cdc usb_hid usb_midi warningsIncluded frozen(?) modules: adafruit_crickit, adafruit_motor, adafruit_seesaw, neopixel
Features: Speaker, Feather-Compatible, Battery Charging, Robotics, OSHWA Certified
CircuitPython 10.3.0-alpha.3
This is the latest development release of CircuitPython that will work with the Feather M0 Express + Crickit.
Alpha development releases are early releases. They are unfinished, are likely to have bugs, and the features they provide may change. Beta releases may have some bugs and unfinished features, but should be suitable for many uses. A Release Candidate (rc) release is considered done and will become the next stable release, assuming no further issues are found.
Please try alpha, beta, and rc releases if you are able. Your testing is invaluable: it helps us uncover and find issues quickly.
Release Notes for 10.3.0-alpha.3
Modules included in this download
adafruit_pixelbuf analogio array audiobusio audiocore audioio board builtins busio busio.SPI busio.UART codeop collections digitalio errno locale math microcontroller neopixel_write nvm onewireio os pulseio pwmio rainbowio random rotaryio rtc storage struct supervisor sys time touchio usb_cdc usb_hid usb_midi warningsIncluded frozen(?) modules: adafruit_crickit, adafruit_motor, adafruit_seesaw, neopixel
Features: Speaker, Feather-Compatible, Battery Charging, Robotics, OSHWA Certified
Absolute Newest
Every time we commit new code to CircuitPython we automatically build binaries for each board and language. The binaries are stored on Amazon S3, organized by board, and then by language. These releases are even newer than the development release listed above. Try them if you want the absolute latest and are feeling daring or want to see if a problem has been fixed.
Previous Versions of CircuitPython
All previous releases of CircuitPython are available for download from Amazon S3 through the button below. For very old releases, look in the OLD/ folder for each board. Release notes for each release are available at GitHub button below.
Older releases are useful for testing if you something appears to be broken in a newer release but used to work, or if you have older code that depends on features only available in an older release. Otherwise we recommend using the latest stable release.
Update UF2 Bootloader
Latest version: v4.0.0
The bootloader allows you to load CircuitPython, MakeCode, and Arduino programs. The bootloader is not CircuitPython. You can check the current version of your bootloader by looking in the INFO_UF2.TXT file when the BOOT drive is visible (FEATHERBOOT, CPLAYBOOT, etc.).
It is not necessary to update your bootloader if it is working fine. Read the release notes on GitHub to see what has been changed. In general, we recommend you not update the bootloader unless you know there is a problem with it or a support person has asked you to try updating it.
To update, first save the contents of CIRCUITPY, just in case. Then double-click the reset button to show the BOOT drive. Drag the update-bootloader .uf2 file to the BOOT drive. Wait a few tens of seconds for the bootloader to update; the BOOT drive will reappear. After you update, check INFO_UF2.TXT to verify that the bootloader version has been updated. Then you will need to reload CircuitPython.