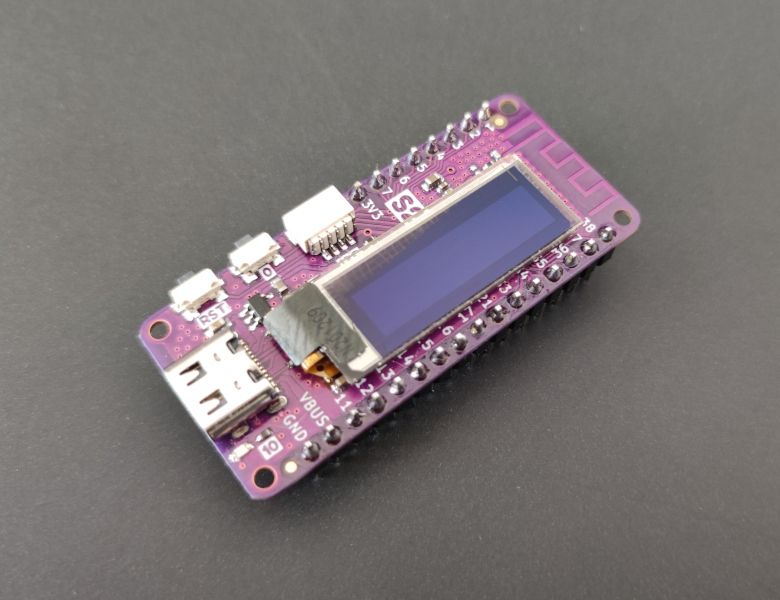
LOLIN S2 Pico by Wemos
A development boards with an OLED and a small form factor.
Features
- ESP32-S2FN4R2 WiFi SoC
- Xtensa® single-core 32-bit LX7 microprocessor, up to 240 MHz
- Integrated 802.11 b/g/n WiFi 2.4 GHz Transceiver, up to 150 Mbps
- Integrated RISC-V ULP Coprocessor
- Integrated Temperature Sensor (-20 °C to 110 °C)
- Operating Voltage: 3.0 to 3.6 V (WiFi: 310 mA (peak), Modem sleep: 12-19 mA, Light sleep: 450 µA, Deep sleep: 20-190 µA)
- 320 KB SRAM, 4 MB Flash (embedded), 2 MB PSRAM (embedded), 16 KB SRAM in RTC (accessable by main CPU, 8 KB accessable by ULP coprocessor), 4 Kbit eFuse (1792 bits reserved for user data)
- 2 x 13-bit SAR ADCs, up to 20 channels (2 channels not available on ADC2 due to USB D+/D-)
- 2 x 8-bit DAC, 14 x touch sensing IOs
- 4 x SPI (2 usable due to embedded flash & PSRAM), 1 x I2S, 2 x I2C, 2 x UART
- 1 x DVP 8/16 camera interface, implemented using the hardware resources of I2S
- 1 x LCD interface SPI2 (8-bit serial RGB/8080/6800), 1 x LCD interface I2S (8/16/24-bit parallel)
- 1 x TWAI® controller compatible with ISO 11898-1 (CAN Specification 2.0)
- LED PWM controller, up to 8 channels
- USB OTG 1.1 controller and PHY, with host and device support
- Cryptographic Hardware Accelerators: AES, ECB/CBC/OFB/CFB/CTR, GCM, SHA, RSA, ECC (Digital Signature)
- USB-C connector, for built-in ROM USB bootloader, serial port debugging, and USB device mode
- 27 x GPIO pins, plus
VBUS,3V3,GND- 21 x pins broken out to breadboard-friendly headers
ENRESET buttonGPIO0BOOT buttonGPIO10LED (blue status LED)- Lolin I2C JST SH 4-pin port (does not match QWIIC/Stemma-Qt pinout) using
GPIO8(SDA) andGPIO9(SCL) - 128 x 32 SSD1306 OLED display internally connected to the same I2C bus as the external port, reset pin connected to
GPIO18, I2C address0x3C(native support in CircuitPython started with firmware version 8.1.0-beta.0, otherwise user code initialization is required)
- Compatible with CircuitPython, MicroPython (default firmware), Arduino and ESP-IDF
Purchase
Learn More
Contribute
Have some info to add for this board? Edit the source for this page here.
CircuitPython 10.2.1
This is the latest stable release of CircuitPython that will work with the LOLIN S2 Pico. Use this release if you are new to CircuitPython.
Modules included in this download
_asyncio _eve _pixelmap adafruit_bus_device adafruit_pixelbuf aesio alarm analogbufio analogio array atexit audiobusio audiocore audioio audiomixer audiomp3 binascii bitbangio bitmapfilter bitmaptools board builtins builtins.pow3 busdisplay busio busio.SPI busio.UART canio codeop collections countio digitalio displayio epaperdisplay errno espcamera espidf espnow espulp fontio fourwire framebufferio frequencyio getpass gifio hashlib i2cdisplaybus io ipaddress jpegio json keypad keypad.KeyMatrix keypad.Keys keypad.ShiftRegisterKeys keypad_demux keypad_demux.DemuxKeyMatrix locale lvfontio math max3421e mdns memorymap microcontroller msgpack neopixel_write nvm onewireio os os.getenv paralleldisplaybus ps2io pulseio pwmio qrio rainbowio random re rgbmatrix rotaryio rtc sdcardio select sharpdisplay socketpool socketpool.socketpool.AF_INET6 ssl storage struct supervisor supervisor.get_setting synthio sys terminalio tilepalettemapper time touchio traceback ulab usb usb_cdc usb_hid usb_midi vectorio warnings watchdog wifi zlibIncluded frozen(?) modules: neopixel
Features: Wi-Fi, USB-C, Display, Breadboard-Friendly
CircuitPython 10.3.0-alpha.4
This is the latest development release of CircuitPython that will work with the LOLIN S2 Pico.
WARNING: On Espressif ESP32-S2 and ESP32-S3 boards with 4MB flash, CircuitPython 10.0.0-beta.0 and later require TinyUF2 bootloader version 0.33.0 or later. Older TinyUF2 bootloaders don't provide enough room for the firmware and cannot load it. See the Release Notes for more details, and see Update UF2 Bootloader below.
Alpha development releases are early releases. They are unfinished, are likely to have bugs, and the features they provide may change. Beta releases may have some bugs and unfinished features, but should be suitable for many uses. A Release Candidate (rc) release is considered done and will become the next stable release, assuming no further issues are found.
Please try alpha, beta, and rc releases if you are able. Your testing is invaluable: it helps us uncover and find issues quickly.
Release Notes for 10.3.0-alpha.4
Modules included in this download
_asyncio _eve _pixelmap adafruit_bus_device adafruit_pixelbuf aesio alarm analogbufio analogio array atexit audiobusio audiocore audiofilewriter audioi2sin audioio audiomixer audiomp3 binascii bitbangio bitmapfilter bitmaptools board builtins builtins.pow3 busdisplay busio busio.SPI busio.UART canio codeop collections countio digitalio displayio epaperdisplay errno espcamera espidf espnow espulp fontio fourwire framebufferio frequencyio getpass gifio hashlib i2cdisplaybus io ipaddress jpegio json keypad keypad.KeyMatrix keypad.Keys keypad.ShiftRegisterKeys keypad_demux keypad_demux.DemuxKeyMatrix locale lvfontio math max3421e mdns memorymap microcontroller msgpack neopixel_write nvm onewireio os os.getenv paralleldisplaybus ps2io pulseio pwmio qrio rainbowio random re rgbmatrix rotaryio rtc sdcardio select sharpdisplay socketpool socketpool.socketpool.AF_INET6 ssl storage struct supervisor supervisor.get_setting synthio sys terminalio tilepalettemapper time touchio traceback ulab usb usb_cdc usb_hid usb_midi vectorio warnings watchdog wifi zlibIncluded frozen(?) modules: neopixel
Features: Wi-Fi, USB-C, Display, Breadboard-Friendly
Absolute Newest
Every time we commit new code to CircuitPython we automatically build binaries for each board and language. The binaries are stored on Amazon S3, organized by board, and then by language. These releases are even newer than the development release listed above. Try them if you want the absolute latest and are feeling daring or want to see if a problem has been fixed.
Previous Versions of CircuitPython
All previous releases of CircuitPython are available for download from Amazon S3 through the button below. For very old releases, look in the OLD/ folder for each board. Release notes for each release are available at GitHub button below.
Older releases are useful for testing if you something appears to be broken in a newer release but used to work, or if you have older code that depends on features only available in an older release. Otherwise we recommend using the latest stable release.
Install, Repair, or Update UF2 Bootloader
Latest version: 0.35.0
The UF2 bootloader allows you to load CircuitPython, MakeCode, and Arduino programs. The bootloader itself is not CircuitPython. On Espressif boards, the UF2 bootloader is called TinyUF2. If the TinyUF2 bootloader is installed, you can check its version by looking in the INFO_UF2.TXT file when the BOOT drive is visible (FTHRS2BOOT, MAGTAGBOOT, HOUSEBOOT, etc.)
In general, it is not necessary to update TinyUF2 at every version change. You can read the release notes on GitHub to see what has been changed. Update if you've been told about a necessary change or a bug fix.
Note: CircuitPython 10 and later, on Espressif boards with 4MB flash, requires TinyUF2 0.33.0 or later. The flash partition layout has changed (details).
If TinyUF2 has never been installed on the board, or it was removed by erasing or overwriting the flash, it must be installed in order to flash .uf2 files onto the board. But you don't need the TinyUF2 bootloader to upload .bin files. They can be uploaded using the built-in ROM bootloader, with the Adafruit WebSerial ESPTool or esptool.py.
Warning: Installing the TinyUF2 bootloader will erase everything that was previously on the board. Save any files in CIRCUITPY for which you don't have backups.
There are several ways to install the TinyUF2 bootloader on your board. Check to see if your board's manufacturer provides specific instructions. For Adafruit boards, consult the Factory Reset page in the Learn Guide for your particular board (example).
The easiest way to install TinyUF2 is to use the OPEN INSTALLER button (see above, in the CiruitPython sections). You can also use the Adafruit WebSerial ESPTool, or esptool.py, as described in the Factory Reset page.
- Plug board into a USB port on your computer using a data/sync cable. Make sure it is the only board plugged in, and that a charge-only cable is not being used.
- Press and hold the BOOT button (sometimes marked "B0").
- Press and release the RESET button (sometimes marked "RST").
- Release the BOOT button. This starts the ROM bootloader.
After installing TinyUF2, enter the UF2 bootloader by double-clicking the RESET button. On boards with an RGB status LED, you usually tap reset once, wait for the LED to turn purple, and tap again before the purple goes away. On other boards, consult the board documentation.
If you are updating TinyUF2, look at INFO_UF2.TXT to verify the new version of TinyUF2, by checking the version number. Then you will need to copy the CircuitPython.uf2 file to the BOOT drive.