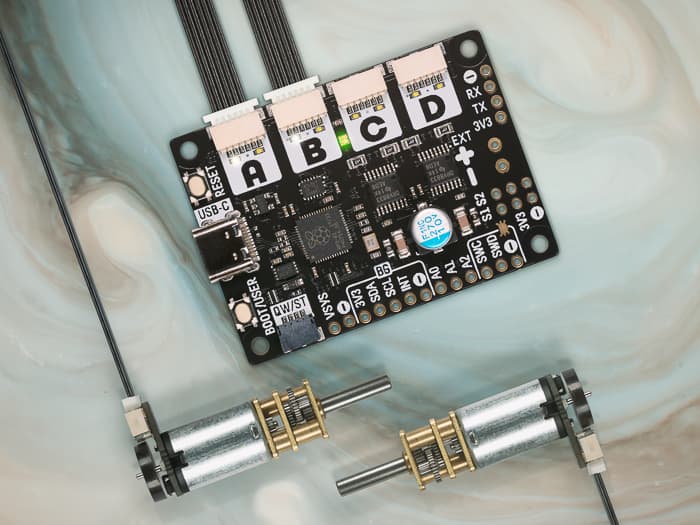
Motor 2040 by Pimoroni
A compact 4 channel motor+encoder controller, powered by RP2040. It has RGB and per-motor indicator LEDs plus built in voltage and current sensing. There’s also a Qwiic/STEMMA QT connector for adding breakouts!
Features
- Powered by RP2040 (Dual Arm Cortex M0+ running at up to 133Mhz with 264kB of SRAM)
- 2MB of QSPI flash supporting XiP
- 2 Dual H-Bridge motor drivers (DRV8833)
- 4 JST-SH connectors (6 pin) for attaching motors
- Wide voltage range for motors and logic (2.7V to 10V)
- On-board 3V3 regulator with input up to 13.2V (max regulator current output 150mA)
- Onboard voltage, current and fault sensing
- Per motor current limiting (0.5A) *
- Per motor direction indicator LEDs **
- Addressable RGB LED/Neopixel
- Reset and BOOT button (the BOOT button can also be used as a user button)
- USB-C connector for programming and power (3A max)
- Qw/ST (Qwiic/STEMMA QT) connector for breakouts
Powering Motor 2040
Motor 2040 can be powered either by plugging the board into a USB-C power source (like a PC or power adapter) or by connecting a battery pack to the EXT PWR or VSYS connections. On an unmodified board, you should only have one power source connected at a time, to avoid back-powering your computer or battery.
If you want to have two power sources connected at the same time, Motor 2040 has two traces on its underside that you can cut to do this safely.
- Cut EXT PWR to VSYS if you want to provide your motors with a separate power supply (up to 10V) from that used to power the rest of the board. Board power (up to 13.2V) will need to be provided either by USB 5V or VSYS.
- Cut USB 5V to VSYS if you want to run the board entirely off a separate power supply, without worry of back-powering your computer. Note that this also means the board will not turn on when only connected by USB.
Notes
- * The current limit of each motor can be disabled by soldering the “high current” pads on the rear (doing this will also disable the current monitoring). The maximum supported output current is 1.2 A continuous (2 A peak) per motor.
- ** The direction indicators for each motor can be disabled by cutting the “motor LED” traces on the rear.
- The pinout of the JST-SH motor connectors is M+, M-, 3v3, A, B, GND.
About RP2040
Raspberry Pi’s RP2040 microcontroller is a dual core ARM Cortex M0+ running at up to 133Mhz. It bundles in 264kB of SRAM, 30 multifunction GPIO pins (including a four channel 12-bit ADC), a heap of standard peripherals (I2C, SPI, UART, PWM, clocks, etc), and USB support.
One very exciting feature of RP2040 is the programmable IOs which allow you to execute custom programs that can manipulate GPIO pins and transfer data between peripherals - they can offload tasks that require high data transfer rates or precise timing that traditionally would have required a lot of heavy lifting from the CPU.
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
CircuitPython 10.2.1
This is the latest stable release of CircuitPython that will work with the Motor 2040. Use this release if you are new to CircuitPython.
Modules included in this download
_asyncio _bleio _bleio (HCI co-processor) _eve _pixelmap adafruit_bus_device adafruit_pixelbuf aesio alarm analogbufio analogio array atexit audiobusio audiocore audiomixer audiomp3 audiopwmio binascii bitbangio bitmapfilter bitmaptools bitops board builtins builtins.pow3 busdisplay busio busio.SPI busio.UART codeop collections countio digitalio displayio epaperdisplay errno floppyio fontio fourwire framebufferio getpass gifio hashlib i2cdisplaybus i2cioexpander i2ctarget imagecapture io jpegio json keypad keypad.KeyMatrix keypad.Keys keypad.ShiftRegisterKeys keypad_demux keypad_demux.DemuxKeyMatrix locale lvfontio math memorymap microcontroller msgpack neopixel_write nvm onewireio os os.getenv paralleldisplaybus pulseio pwmio qrio rainbowio random re rgbmatrix rotaryio rp2pio rtc sdcardio select sharpdisplay storage struct supervisor supervisor.get_setting synthio sys terminalio tilepalettemapper time touchio traceback ulab usb usb_cdc usb_hid usb_host usb_midi usb_video vectorio warnings watchdog zlibFeatures: Robotics, STEMMA QT/QWIIC, USB-C, Breadboard-Friendly
CircuitPython 10.3.0-alpha.3
This is the latest development release of CircuitPython that will work with the Motor 2040.
Alpha development releases are early releases. They are unfinished, are likely to have bugs, and the features they provide may change. Beta releases may have some bugs and unfinished features, but should be suitable for many uses. A Release Candidate (rc) release is considered done and will become the next stable release, assuming no further issues are found.
Please try alpha, beta, and rc releases if you are able. Your testing is invaluable: it helps us uncover and find issues quickly.
Release Notes for 10.3.0-alpha.3
Modules included in this download
_asyncio _bleio _bleio (HCI co-processor) _eve _pixelmap adafruit_bus_device adafruit_pixelbuf aesio alarm analogbufio analogio array atexit audiobusio audiocore audioi2sin audiomixer audiomp3 audiopwmio audiospeed binascii bitbangio bitmapfilter bitmaptools bitops board builtins builtins.pow3 busdisplay busio busio.SPI busio.UART codeop collections countio digitalio displayio epaperdisplay errno floppyio fontio fourwire framebufferio getpass gifio hashlib i2cdisplaybus i2cioexpander i2ctarget imagecapture io jpegio json keypad keypad.KeyMatrix keypad.Keys keypad.ShiftRegisterKeys keypad_demux keypad_demux.DemuxKeyMatrix locale lvfontio math memorymap microcontroller msgpack neopixel_write nvm onewireio os os.getenv paralleldisplaybus pulseio pwmio qrio rainbowio random re rgbmatrix rotaryio rp2pio rtc sdcardio select sharpdisplay storage struct supervisor supervisor.get_setting synthio sys terminalio tilepalettemapper time touchio traceback ulab usb usb_audio usb_cdc usb_hid usb_host usb_midi usb_video vectorio warnings watchdog zlibFeatures: Robotics, STEMMA QT/QWIIC, USB-C, Breadboard-Friendly
Absolute Newest
Every time we commit new code to CircuitPython we automatically build binaries for each board and language. The binaries are stored on Amazon S3, organized by board, and then by language. These releases are even newer than the development release listed above. Try them if you want the absolute latest and are feeling daring or want to see if a problem has been fixed.
Previous Versions of CircuitPython
All previous releases of CircuitPython are available for download from Amazon S3 through the button below. For very old releases, look in the OLD/ folder for each board. Release notes for each release are available at GitHub button below.
Older releases are useful for testing if you something appears to be broken in a newer release but used to work, or if you have older code that depends on features only available in an older release. Otherwise we recommend using the latest stable release.