QT Py by Adafruit
Note: If you soldered the optional SOIC-8 SPI Flash chip on to your QT Py, see the “QT Py Haxpress” page to make use of the extra space!
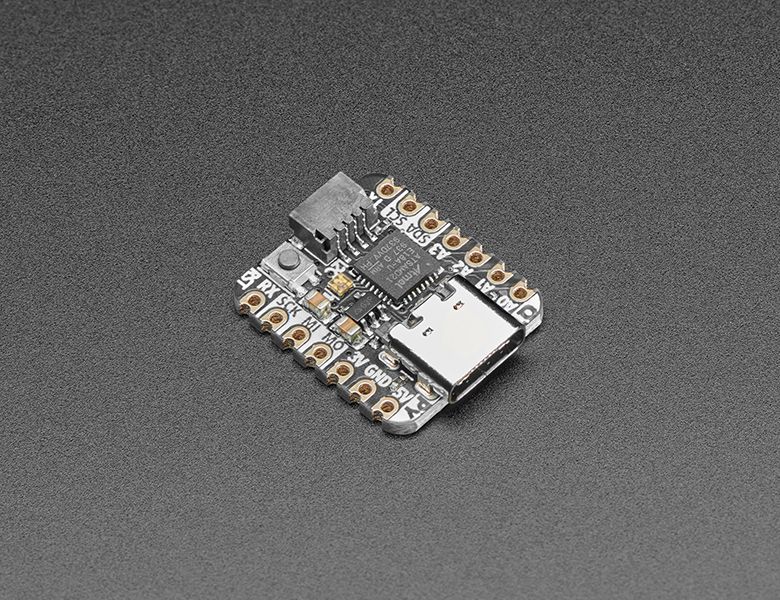
What a cutie pie! Or is it… a QT Py? This diminutive dev board comes with our favorite lil chip, the SAMD21 (as made famous in our GEMMA M0 and Trinket M0 boards).
This time it comes with our favorite connector - the STEMMA QT, a chainable I2C port that can be used with any of our STEMMA QT sensors and accessories.
OLEDs! Inertial Measurment Units! Sensors a-plenty. All plug-and-play thanks to the innovative chainable design: SparkFun Qwiic-compatible STEMMA QT connectors for the I2C bus so you don’t even need to solder! Just plug in a compatible cable and attach it to your MCU of choice, and you’re ready to load up some software and measure some light.
Use any SparkFun Qwiic boards! Seeed Grove I2C boards will also work with this adapter cable.
Pinout and shape is Seeed Xiao compatible, with castellated pads so you can solder it flat to a PCB. In addition to the QT connector, we also added an RGB NeoPixel (with controllable power pin to allow for ultra-low-power usage), and a reset button (great for restarting your program, or entering the bootloader)
Runs Arduino like a dream, and can be used for basic CircuitPython projects. For more advanced usage like datalogging or file storage, solder an SOIC SPI flash chip onto the bottom pads,
- Same size (20 mm x 17.5 mm), form-factor, and pin-out as Seeed Xiao
- ATSAMD21E18 32-bit Cortex M0+ - 48 MHz 32-bit processor with 256 KB Flash and 32 KB RAM
- Native USB supported by every OS - can be used in Arduino or CircuitPython as USB serial console, MIDI, Keyboard/Mouse HID, even a little disk drive for storing Python scripts.
- Can be used with Arduino IDE or CircuitPython
- Built in RGB NeoPixel LED
- 11 GPIO pins:
- True analog output on one I/O pin - can be used to play 10-bit quality audio clips in Arduino (CircuitPython does not have storage for audio clips)
- 9 x 12-bit analog inputs (SDA/SCL do not have analog inputs)
- 1 x Optional AREF on
A1 - 9 x PWM outputs (
A0is analog out,A1is not PWM capable) - Hardware I2C port with STEMMA QT plug-n-play connector
- Hardware UART, Hardware SPI, Hardware I2S
- 6 x Capacitive Touch with no additional components required
- 3.3 V regulator with 600 mA peak output
- Optional SOIC-8 SPI Flash chip on bottom
- Reset switch for starting your project code over or entering bootloader mode
- USB-C connector
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
CircuitPython 10.2.1
This is the latest stable release of CircuitPython that will work with the QT Py. Use this release if you are new to CircuitPython.
Modules included in this download
analogio array board builtins busio busio.SPI busio.UART collections digitalio math microcontroller neopixel_write nvm os pwmio rainbowio random rotaryio rtc storage struct supervisor sys time touchio usb_cdc usb_hid usb_midiFeatures: STEMMA QT/QWIIC, USB-C, Breadboard-Friendly, Xiao / QTPy Form Factor, Castellated Pads, OSHWA Certified
CircuitPython 10.3.0-alpha.3
This is the latest development release of CircuitPython that will work with the QT Py.
Alpha development releases are early releases. They are unfinished, are likely to have bugs, and the features they provide may change. Beta releases may have some bugs and unfinished features, but should be suitable for many uses. A Release Candidate (rc) release is considered done and will become the next stable release, assuming no further issues are found.
Please try alpha, beta, and rc releases if you are able. Your testing is invaluable: it helps us uncover and find issues quickly.
Release Notes for 10.3.0-alpha.3
Modules included in this download
analogio array board builtins busio busio.SPI busio.UART collections digitalio math microcontroller neopixel_write nvm os pwmio rainbowio random rotaryio rtc storage struct supervisor sys time touchio usb_cdc usb_hid usb_midiFeatures: STEMMA QT/QWIIC, USB-C, Breadboard-Friendly, Xiao / QTPy Form Factor, Castellated Pads, OSHWA Certified
Absolute Newest
Every time we commit new code to CircuitPython we automatically build binaries for each board and language. The binaries are stored on Amazon S3, organized by board, and then by language. These releases are even newer than the development release listed above. Try them if you want the absolute latest and are feeling daring or want to see if a problem has been fixed.
Previous Versions of CircuitPython
All previous releases of CircuitPython are available for download from Amazon S3 through the button below. For very old releases, look in the OLD/ folder for each board. Release notes for each release are available at GitHub button below.
Older releases are useful for testing if you something appears to be broken in a newer release but used to work, or if you have older code that depends on features only available in an older release. Otherwise we recommend using the latest stable release.
Update UF2 Bootloader
Latest version: v4.0.0
The bootloader allows you to load CircuitPython, MakeCode, and Arduino programs. The bootloader is not CircuitPython. You can check the current version of your bootloader by looking in the INFO_UF2.TXT file when the BOOT drive is visible (FEATHERBOOT, CPLAYBOOT, etc.).
It is not necessary to update your bootloader if it is working fine. Read the release notes on GitHub to see what has been changed. In general, we recommend you not update the bootloader unless you know there is a problem with it or a support person has asked you to try updating it.
To update, first save the contents of CIRCUITPY, just in case. Then double-click the reset button to show the BOOT drive. Drag the update-bootloader .uf2 file to the BOOT drive. Wait a few tens of seconds for the bootloader to update; the BOOT drive will reappear. After you update, check INFO_UF2.TXT to verify that the bootloader version has been updated. Then you will need to reload CircuitPython.