StringCar M0 Express by Cedar Grove Studios
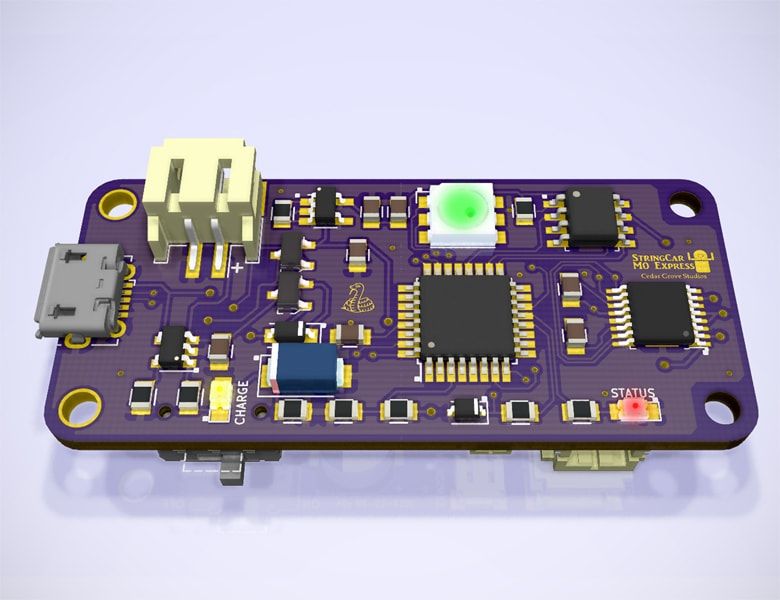
The Cedar Grove StringCar M0 Express is an ATSAMD21-based CircuitPython compatible board used to control a simple string car racer robot. The board is architecturally similar to the Adafruit Trinket M0 and ItsyBitsy M0 Express microcontroller boards with the addition of battery management and a DC motor controller. This board features JST connectors for the racer’s battery, motor output, and sensor input. LiPo battery management charge rate is 500mA. For sensor experimentation, a 3.3-volt Stemma-QT connection is available on-board. The micro-USB connector used for REPL operation, operational status data output, and battery charging. On-board flash memory size is 2MB.
The StringCar M0 Express board will not be sold. The GitHub repository will contain all design files and links for the BOM and the shared OSH Park project.
The string car racer is a simple one-motor robot that is suspended from a string using a pulley attached to the motor shaft. Its challenge is to race back and forth from one end of a taut string to the other. The fastest car wins. The controller board uses sensor switches to detect the ends of the string, calculate the string length, then control motor speed and braking to avoid string-end collisions.
The objective is to create a string car racer that can autonomously learn about its environment and adjust tradeoffs for speed and battery longevity. CircuitPython is used to easily add and interactively adjust performance features such as motor and battery efficiency, end-of-string collision avoidance, string length calculation, and predictive braking. Also, being able to watch its own battery status means that it’ll always return to the home end of the string when battery capacity begins to wane. Circuit Python also supports libraries that abstract string car functions, simplifying the primary code module to make it easier for novice programmers to get involved in customizing string car racer operation.
Contribute
Have some info to add for this board? Edit the source for this page here.
CircuitPython 10.2.1
This is the latest stable release of CircuitPython that will work with the StringCar M0 Express. Use this release if you are new to CircuitPython.
Modules included in this download
adafruit_pixelbuf analogio array audiobusio audiocore audioio board builtins busdisplay busio busio.SPI busio.UART codeop collections digitalio displayio epaperdisplay errno fontio fourwire i2cdisplaybus locale math microcontroller neopixel_write nvm onewireio os paralleldisplaybus pulseio pwmio rainbowio random rotaryio rtc storage struct supervisor sys terminalio time touchio usb_cdc usb_hid warningsFeatures: Battery Charging
CircuitPython 10.3.0-alpha.3
This is the latest development release of CircuitPython that will work with the StringCar M0 Express.
Alpha development releases are early releases. They are unfinished, are likely to have bugs, and the features they provide may change. Beta releases may have some bugs and unfinished features, but should be suitable for many uses. A Release Candidate (rc) release is considered done and will become the next stable release, assuming no further issues are found.
Please try alpha, beta, and rc releases if you are able. Your testing is invaluable: it helps us uncover and find issues quickly.
Release Notes for 10.3.0-alpha.3
Modules included in this download
adafruit_pixelbuf analogio array audiobusio audiocore audioio board builtins busdisplay busio busio.SPI busio.UART codeop collections digitalio displayio epaperdisplay errno fontio fourwire i2cdisplaybus locale math microcontroller neopixel_write nvm onewireio os paralleldisplaybus pulseio pwmio rainbowio random rotaryio rtc storage struct supervisor sys terminalio time touchio usb_cdc usb_hid warningsFeatures: Battery Charging
Absolute Newest
Every time we commit new code to CircuitPython we automatically build binaries for each board and language. The binaries are stored on Amazon S3, organized by board, and then by language. These releases are even newer than the development release listed above. Try them if you want the absolute latest and are feeling daring or want to see if a problem has been fixed.
Previous Versions of CircuitPython
All previous releases of CircuitPython are available for download from Amazon S3 through the button below. For very old releases, look in the OLD/ folder for each board. Release notes for each release are available at GitHub button below.
Older releases are useful for testing if you something appears to be broken in a newer release but used to work, or if you have older code that depends on features only available in an older release. Otherwise we recommend using the latest stable release.