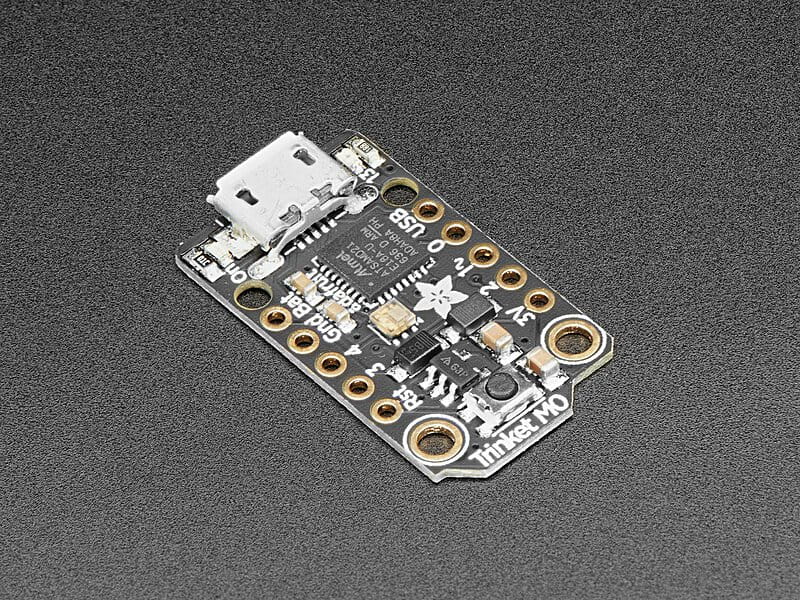
Trinket M0 by Adafruit
The Adafruit Trinket M0 may be small, but do not be fooled by its size! It’s a tiny microcontroller board, built around the Atmel ATSAMD21, a little chip with a lot of power. Adafruit designed a microcontroller board that was small enough to fit into any project, and low cost enough to use without hesitation. Perfect for when you don’t want to give up your expensive dev-board and you aren’t willing to take apart the project you worked so hard to design. It’s one of the lowest-cost CircuitPython programmable boards!
Adafruit used the same form factor for the original ATtiny85-based Trinket and gave it an upgrade. The Trinket M0 has swapped out the lightweight ATtiny85 for a ATSAMD21E18 powerhouse. It’s just as small, and it’s easier to use, so you can do more.
The most exciting part of the Trinket M0 is that while you can use it with the Arduino IDE, it ships with CircuitPython on board. When you plug it in, it will show up as a very small disk drive with code.py on it. Edit code.py with your favorite text editor to build your project using Python, the most popular programming language. No installs, IDE or compiler needed, so you can use it on any computer, even ChromeBooks or computers you can’t install software on. When you’re done, unplug the Trinket M0 and your code will go with you. Please check out the Trinket M0 CircuitPython guide for a list of capabilities and quick-start code examples - CircuitPython is easier to code but not as low-level and complete as Arduino.
Here are some of the updates you can look forward to when using Trinket M0:
- Same size, form-factor, and pinout as classic Trinket
- Updating ATtiny85 8-bit AVR for ATSAMD21E18 32-bit Cortex M0+
- 256KB Flash - 32x as much as 8 KB on ATtiny85
- 32 KB RAM - 64x as much as 512 bytes on ATtiny85
- 48 MHz 32 bit processor - 6x as fast as ATtiny85 (not even taking into account 32-bit speedups)
- Native USB supported by every OS - can be used in Arduino or CircuitPython as USB serial console, Keyboard/Mouse HID, even a little disk drive for storing Python scripts. (ATtiny85 does not have native USB)
- Can be used with Arduino IDE or CircuitPython
- Built in green ON LED
- Built in red pin #13 LED
- Built in RGB DotStar LED
- All 5 GPIO pins are available and are not shared with USB - so you can use them for whatever you like!
- Five GPIO pins with digital input/output with internally connected pullups or pulldowns
- Three of the I/O pins can be used for 12-bit analog input
- True analog output on one I/O pin - can be used to play 10-bit quality audio clips in Arduino (CircuitPython does not have storage for audio clips)
- We gave the M0 pads the exact same names as the original Trinket so all your existing Arduino code will work exactly the same as-is without changes
- Two high speed PWM outputs - for servos, LEDs, etc
- Three pins can also be used as hardware capacitive touch sensors with no additional components required
- Can drive NeoPixels or DotStars on any pins, with enough memory to drive 8000+ pixels. DMA-NeoPixel support on one pin so you can drive pixels without having to spend any processor time on it.
- Native hardware SPI, I2C and Serial available on two pads so you can connect to any I2C or Serial device with true hardware support (no annoying bit-banging). You can have either one SPI device or both I2C and Serial.
- Same Reset switch for starting your project code over
- Power with either USB or external output (such as a battery) - it’ll automatically switch over
- Mounting holes! Yeah!
- Really really small
Each is fully assembled and tested Trinket M0 with CircuitPython & example code programmed in.
So what are you waiting for? Pick up a Trinket M0 today and be amazed at how easy and fast it is to get started with Trinket and CircuitPython!
Tutorials
Purchase
Contribute
Have some info to add for this board? Edit the source for this page here.
CircuitPython 10.2.1
This is the latest stable release of CircuitPython that will work with the Trinket M0. Use this release if you are new to CircuitPython.
Modules included in this download
analogio array board builtins busio busio.SPI busio.UART collections digitalio math microcontroller neopixel_write nvm os pwmio rainbowio random rotaryio rtc storage struct supervisor sys time touchio usb_cdc usb_hid usb_midiFeatures: Breadboard-Friendly, OSHWA Certified
CircuitPython 10.3.0-alpha.3
This is the latest development release of CircuitPython that will work with the Trinket M0.
Alpha development releases are early releases. They are unfinished, are likely to have bugs, and the features they provide may change. Beta releases may have some bugs and unfinished features, but should be suitable for many uses. A Release Candidate (rc) release is considered done and will become the next stable release, assuming no further issues are found.
Please try alpha, beta, and rc releases if you are able. Your testing is invaluable: it helps us uncover and find issues quickly.
Release Notes for 10.3.0-alpha.3
Modules included in this download
analogio array board builtins busio busio.SPI busio.UART collections digitalio math microcontroller neopixel_write nvm os pwmio rainbowio random rotaryio rtc storage struct supervisor sys time touchio usb_cdc usb_hid usb_midiFeatures: Breadboard-Friendly, OSHWA Certified
Absolute Newest
Every time we commit new code to CircuitPython we automatically build binaries for each board and language. The binaries are stored on Amazon S3, organized by board, and then by language. These releases are even newer than the development release listed above. Try them if you want the absolute latest and are feeling daring or want to see if a problem has been fixed.
Previous Versions of CircuitPython
All previous releases of CircuitPython are available for download from Amazon S3 through the button below. For very old releases, look in the OLD/ folder for each board. Release notes for each release are available at GitHub button below.
Older releases are useful for testing if you something appears to be broken in a newer release but used to work, or if you have older code that depends on features only available in an older release. Otherwise we recommend using the latest stable release.
Update UF2 Bootloader
Latest version: v4.0.0
The bootloader allows you to load CircuitPython, MakeCode, and Arduino programs. The bootloader is not CircuitPython. You can check the current version of your bootloader by looking in the INFO_UF2.TXT file when the BOOT drive is visible (FEATHERBOOT, CPLAYBOOT, etc.).
It is not necessary to update your bootloader if it is working fine. Read the release notes on GitHub to see what has been changed. In general, we recommend you not update the bootloader unless you know there is a problem with it or a support person has asked you to try updating it.
To update, first save the contents of CIRCUITPY, just in case. Then double-click the reset button to show the BOOT drive. Drag the update-bootloader .uf2 file to the BOOT drive. Wait a few tens of seconds for the bootloader to update; the BOOT drive will reappear. After you update, check INFO_UF2.TXT to verify that the bootloader version has been updated. Then you will need to reload CircuitPython.